Baue mir einen Bartop Arcade Kasten mit Retropie und MAME.
Hier mal ein paar Fotos vom Bau.
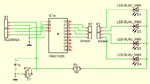
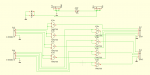
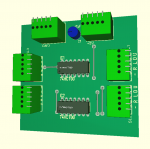
Nebst Raspi 3B+ kommt noch ein HDMI Scanline Generator, E-Limitator und 5V/12V Power Netzteil (siehe Screenshot) rein.
Monitor benutze ich ein Philips 243V7QDSB.
Audioverstärker hab ich so einen: %product-title% - Conrad Electronic Schweiz . Zu sehen im Bild Nr. 7. ...toller Bausatz. Aber den 3.5mm Jack haben sie nach vorne raus angebracht. Das ist unglücklich. Muss noch ein 90° Stück einbauen
Das vorgefertigte Holz habe ich bei arcadeforge.net bestellt. Dieses selber machen kommt nicht so sauber, wenn man nicht für Holzarbeiten ausgerüstet ist.
Die SSD ist angeklettet. Nutze keine SD Card, sondern eine SSD am RPI.... ja, das geht.
Hier mal ein paar Fotos vom Bau.
Nebst Raspi 3B+ kommt noch ein HDMI Scanline Generator, E-Limitator und 5V/12V Power Netzteil (siehe Screenshot) rein.
Monitor benutze ich ein Philips 243V7QDSB.
Audioverstärker hab ich so einen: %product-title% - Conrad Electronic Schweiz . Zu sehen im Bild Nr. 7. ...toller Bausatz. Aber den 3.5mm Jack haben sie nach vorne raus angebracht. Das ist unglücklich. Muss noch ein 90° Stück einbauen
Das vorgefertigte Holz habe ich bei arcadeforge.net bestellt. Dieses selber machen kommt nicht so sauber, wenn man nicht für Holzarbeiten ausgerüstet ist.
Die SSD ist angeklettet. Nutze keine SD Card, sondern eine SSD am RPI.... ja, das geht.
Anhänge
-
 im.bau1.jpg107,3 KB · Aufrufe: 8
im.bau1.jpg107,3 KB · Aufrufe: 8 -
 im.bau2.jpg89,8 KB · Aufrufe: 10
im.bau2.jpg89,8 KB · Aufrufe: 10 -
 im.bau3.jpg100,4 KB · Aufrufe: 9
im.bau3.jpg100,4 KB · Aufrufe: 9 -
 im.bau4.jpg81,3 KB · Aufrufe: 9
im.bau4.jpg81,3 KB · Aufrufe: 9 -
 im.bau5.jpg75,1 KB · Aufrufe: 7
im.bau5.jpg75,1 KB · Aufrufe: 7 -
 im.bau6.jpg86,2 KB · Aufrufe: 9
im.bau6.jpg86,2 KB · Aufrufe: 9 -
 Auswahl_002.png281,1 KB · Aufrufe: 8
Auswahl_002.png281,1 KB · Aufrufe: 8 -
 im.bau7.jpg89,2 KB · Aufrufe: 11
im.bau7.jpg89,2 KB · Aufrufe: 11 -
 im.bau8.jpg128,9 KB · Aufrufe: 11
im.bau8.jpg128,9 KB · Aufrufe: 11 -
 im.bau9.jpg52,4 KB · Aufrufe: 12
im.bau9.jpg52,4 KB · Aufrufe: 12 -
 im.bau10.jpg57,2 KB · Aufrufe: 8
im.bau10.jpg57,2 KB · Aufrufe: 8
Zuletzt bearbeitet: